
时间: 2024-02-21 06:20:41 | 作者: 爱游戏体育app平台
Day 上,特斯拉着重强调了⾃⼰的BEV ⽹络(更多⽤于静态物体的识别)。
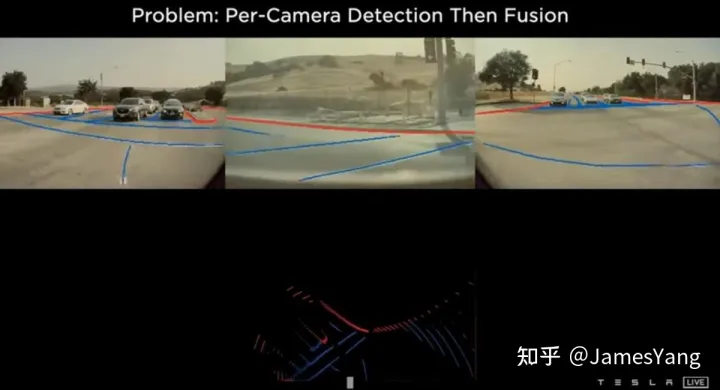
但是今年,特斯拉基本上没太多去提BEV 相关联的内容,⽽是⼜新推出占⽤神经⽹络(the occupancy network),直接通过摄像头来构建真实世界三维模型。
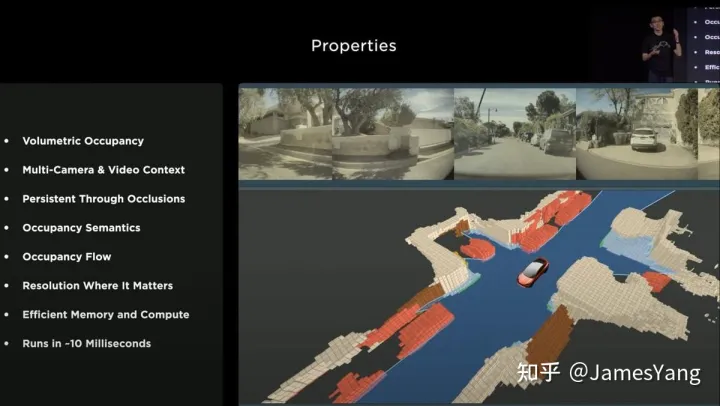
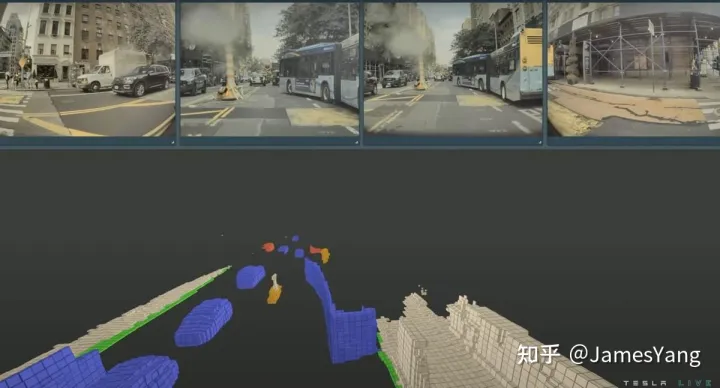
同时,增加了对动态物体以及运动状态可能发⽣变化的物体的识别,⽐如这个公交:
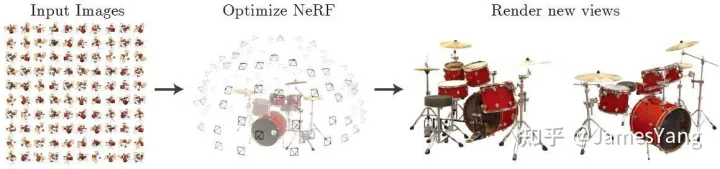
此外,特斯拉还准备引⼊更多新的神经网络,⽐如NeRF((Neural Radiance Fields) 神经辐射场,提升重建三维场景的能⼒。
举特斯拉的例⼦其实是为说明:「纯视觉这条路并没那么好⾛,技术路线可能随时会发⽣调整。」就好像现在BEV ⽹络被占⽤⽹络替代⼀样,后续很有可能还会被新的⽹络模型所替代。「纯视觉⽅案能⼒上限:逼近L3」特斯拉FSD基本上代表了纯视觉的最⾼⽔平,这⼀点⼤家不否认吧。 ⽽从能⼒实现层⾯,在海外,就说美国本⼟吧,「现在特斯拉FSD Beta 能⼒已经⽆限逼近L3。」不管是城市、⾼速,亦或者是没有⻋道线的乡村⼟路,特斯拉FSD 都能去开上⼀开。 特斯拉的⽜逼之处就在于使⽤普通的导航地图,就能实现类似⾼精地图的能⼒。 不过,特斯拉⽬前在两⽅⾯去继续钻研:「能⼒和体验。」「能力」能⼒层⾯,⾏⻋「这⼀块差不多实现七七⼋⼋」,仍在啃⼀些⻓尾场景的硬⻣头,⽐如说这种路边随处停着的⼀台⻋,⽆法分辨这台⻋的状态(动态or 静态):

「在拿掉超声波传感器之后,特斯拉纯视觉正式向泊⻋域开进」,将会解决此前此前特斯拉泊⻋⽅⾯的问题(⽐如⽆法识别空⻋位、泊⻋识别率和泊⼊成功率等)。「体验」体验层⾯,特斯拉引⼊打分机制,提升FSD 使⽤舒适度:
「纯视觉领域的玩家」其实,不单单是特斯拉,还有好⼏个玩家都在纯视觉领域摸索。 ⽐如Mobileye。这位也是纯视觉领域的⼤拿。 EyeQ 系列芯⽚在⾏业⾥出货量很多,很⼤⼚商都在采⽤EyeQ 芯⽚来提供视觉感知,⽐如早期的特斯拉、蔚来、理想,都和Mobileye 有很深的合作。 接下来说Mobileye 在纯视觉领域的进展。 Mobileye 开发了两套⾃动驾驶系统:纯视觉:摄像头⼦系统Mobileye SuperVision和雷达/ 激光雷达⼦系统,两台系统独⽴运⾏,互为补充。 不同于特斯拉,Mobileye 会⽤到众包⾼精地图。 摄像头⼦系统Mobileye SuperVision,也就是纯视觉这套,已经在国内新实⼒⻋企极氪上量产,能⼒差不多是L2+ 的样⼦:

但是由于没能解决地图问题,很多能⼒⽐如领航辅助都⽆法解锁。 今年9⽉,Mobileye 宣布与吉利控股集团进⼀步扩⼤业务合作:极氪还将在两款新⻋型上搭载Mobileye SuperVision,并与Mobileye 共同开发基于激光雷达的新功能。 基于环视视觉打造的系统预计将于今年年底通过OTA 更新实现全部功能释放。

虽然国内Mobileye SuperVision能⼒看着很差,但它真正的实⼒不容⼩觑(要不然吉利也不会扩⼤和它的合作)。 和特斯拉⼀样,Mobileye SuperVision也要看它在海外的能⼒。今年8⽉,Mobileye 完成了为期数天的洲际公路之旅,对其下⼀代Mobileye SuperVision开展了测试,基于现有REM 的⾼精地图,⽤4 天⾏驶近2000 公⾥,穿越南欧和中欧6 国。「翻译⼀下就是,Mobyeye 这套纯视觉解决⽅案适⽤性⾮常强,只要有REM 众包地图,不管是在哪个国家或者地区,都能很快应⽤起来。」⽬前,关于下⼀代Mobileye SuperVision,我们也可以得到的信息是: 1、采⽤两块EyeQ6HEyeQ6H 芯⽚(⽬前极氪⽤的那套还是EyeQ5芯⽚); 2、能⼒⽅⾯,可实现可脱⼿/ 眼睛需注视的L2++ 系统。
还是那句话,我们不知道⾃动驾驶的最终哪条路能⾛通。我们分为三种情况来看:
2、纯视觉和激光雷达路线、只有激光雷达路线、只有纯视觉这条路⾛得通」但是如果只有这条路真的⾛通了,那么特斯拉⼜将成为开创者。 就像现在她在电动⻋领域创造的辉煌⼀样,作为头⽺,可以吃到最⼤最多的红利。 ⽽且,纯视觉路线成本很低,毕竟摄像头也没多少钱。随着⻋辆⼤规模交付,规模效应之下,成本会更低。 也不⽤说那么远,现在特斯拉拿掉毫⽶波雷达和超声波传感器,根据⻋拆解团队Munro Live 公开的分析报告数据显示,「这样操作特斯拉平均每辆⻋节省114 美元,约合⼈⺠币817 元。」这都是实打实的好处。「2、纯视觉和激光雷达路线都可以⾛通」这就很意思了。 如果激光雷达路线也能跑通,但是各项成本算下来,似乎纯视觉成本还是要更便宜⼀点……「3、只有激光雷达路线⾛得通」如果到这样一个时间段,我想各种传感器价格应该被打下来了。 如果真到这样一个时间段,激光雷达和毫⽶波雷达⼀样便宜,我想特斯拉也⼀样会⽤。 虽然特斯拉⼀直专精在纯视觉,但是特斯拉也在研究各种可能性,⽐如4D 毫⽶波雷达等等。 所以,即便是调转研究⽅向,那么,特斯拉依然能够⾮常快的调整过来,并占据领先优势。 所以,最后,提⼀个建议,虽然激光雷达、4Dh 毫⽶波雷达的出现和应⽤,⼤幅度提升了⾃动驾驶感知能⼒,但是「我还是希望各家⻋企能够始终重视计算机视觉感知的研发,毕竟,任何传感器都无法替代摄像头的作⽤,同时也能在未来无人驾驶技术竞争中,取得领头羊。」

。通过此次合作,双方将在中国开发和发布Mobileye的路网采集管理(REM®)产品,结合四维图新
必备的算法、传感器、高精地图、芯片等领域,力求为中国的汽车工程师们带来具有前瞻性与创新力的技术
k随着汽车电子的日益复杂化和汽车电子电气架构(EEA)的升级,人类对于联网智能汽车的需求也在逐步上升,大量先进的技术往汽车上应用,如高级
事故,和最近在Defcon上演示的如何干扰传感器,都充分说明了传感器在
实现的基础,若无法正确地感知周围环境,那么接下来的认知、决策与控制,都是空中楼台。
习惯、运输行业并更广泛地影响社会。 我们不仅仅可以将汽车召唤到我们的家门口并在使用后将其送走,
,现在不是主流。4. 单线雷达+IMU+里程计融合满足室内定位的要求,个人理解可大致分为浅融合和深融合。浅融合使用IMU+里程计的累加值作为推算雷达里程计的初值,在这
;某些高科技公司则希望能够通过各种外部传感器实时采集海量数据,处理器经过数据分析然后
和背后技术有了更广泛地讨论、更深刻地认知;另一方面则是让不少风投看到了机会,认为传感器芯片为代表的硬件研发,以及计算机
化、人工智能等技术的快速的提升,预计到2021年市场上会出现第一批绝对没方向盘等
是将电池电压增加至800V,这样就可以将充电时间减少到20分钟(电量达到80%),续航距离也能达到300英里以上。
高峰论坛 将于 2017年11月28/29日 在 德国慕尼黑 举办,中德联合股份公司作为中国独家合作伙伴,诚邀您拨冗莅临!【活动背景】AI
LG电子(LG Electronics)宣布,在其年底进行业务重组期间,将成立两个新部门,机器人和
汽车部门,两部门都由该公司首席执行官直接管理。据羿戓信息所了解,该家韩国科技巨头表示,成立
精位科技基于UWB技术的深厚底层研究以及丰富的应用实践经验,提出了UWB可以在
就需要知道车辆在道路的精准位置信息,目前依靠GPS+RTK、惯导、激光雷达、毫米波雷达、超声波雷达、视频
汽车奠基人的斯坦福大学教授塞巴斯蒂安·特伦(Sebastian Thrun)。在谷歌任职时,特伦
申请理由:很喜欢硬件功能完善的机器人,这款机器人上面的多种传感器及器件均用过,超声波传感器和巡线传感器还未接触过,想了解下这种传感器的灵敏度和精度,而且近年来
的冬天来了?“一个致命的事故一定是由多个小的错误组成的。”7月初,特斯拉发表博客叙述了NHTSA(美国国家公路交通安全管理局)正在着手调查第一起Tesla
计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有一点人类主动的操作下,
今年4月底,PIX 接到北京某学校建立“分布式控制新能源车智能底盘实验室”的需求,同时需要配套
以及教学内容,经过多方技术评估审核和投标流程,PIX 超级底盘在“分布式驱动
和车联网部署成本。与雷达、激光雷达等传感器不同,我们大家可以把V2X视为一种无线传感器系统的
汽车最终获准上路行驶扫除了一个重大障碍。在此之前,苹果、英特尔等IT巨头的半路杀入以及各大汽车巨头的强势推进,驱动了无人
对实时性、低功耗、稳定性的要求,我们抛弃了目前以工控机为主的研发平台,选择低功耗的嵌入式硬件为
,这是我们测试的视频《基于slam算法的智能机器人》调研分析报告项目背景分析机器人曾经是科幻电影中的形象,可目前已经渐渐走入我们的生活。机器人技术以包含机械、电子、
技术为人们勾勒出了一副美好的未来出行的画面:坐上没有方向盘的汽车,一觉睡到公司门口;甚至我们可能不再拥有一辆汽车,需要出门时共享
的重要组成部分,同时安全性至关重要。作为全世界第7大汽车半导体供应商,安森美半导体提供全面的智能感知
(报告出品方/作者:国金证券,翟炜)报告综述产业链与市场空间:当前我国
正处于 L2 向 L3 级别转化的阶段,预 计 2025 年 L2.5 级别
技术是怎么回事,是用什么板子开发的需要应用哪些技术和知识。提问题提得不是很好请各位见谅
汽车测试和研究的枢纽,硅谷目前已有六十家公司获得测试许可,能够在加州道路上
刹车及泊车辅助等系统大范围的应用于当前的车型,甚至是功能更为强大的车道保持、塞车
技术Toyota研究机构负责人Gill Pratt列出几点和无人车相关的技术。首先是智能手机,其有关技术、低电压计算机处理器、计算机
系统是一个复杂的系统,需要对总系统进行全方位的大量实测,尽可能模拟实际商用情况,制定出完整的
公共车辆——出租车、拼车或公交车,能够将我们从公共交通站、市中心或办公区域带到想去的地方(最后一公里)。有没有更好的ADAS系统
汽车已经行驶近30万公里了,非常的强大~~上次参加了重庆新能源汽车峰会,对会上富士通半导体宣讲的一款全景视频汽车实时监控技术平台似乎看到了
高阶版本的增强和补充,通过车与车、车与人、车与交通基础设施、车与网络的互联互通,让对环境已经具备感知能力的
;还有一种则是类似特斯拉、谷歌等使用的多个摄像头与声波雷达环视,并通过一
汽车本质上是一台装有轮子的高性能计算机,它通过大量的传感器来收集数据。为了使得这些车辆能够安全可靠地运行,它们需要立即对周围的环境做出
和电动汽车之路”。研讨会吸引了来自联邦、州和当地的交通组织机构等160位参会者。David目前为Eno Center for Transportation (以下简称Eno
,本着“开放、共享”的原则,速腾聚创旨在与业内伙伴一道,更好更快地探索
技术的未来。半年时间里,速腾聚创已和来自汽车OEM厂商、科技公司及高校等领域的合作伙伴一起
,由于汽车能看,能解读要做什么,并能依此采取行动,因此我们已有了全部所需的基本模块。如欲查阅有关
及模式识别领域顶级学术会议) 2019会议期间,百度Apollo公开了国内唯一的
软件、传感系统和系统整合方面的全球领先者。双方的合作将开发出市场上首个一站式4/5级
电车汇消息:9月24日,在华为全联接大会2020上,华为正式对外发布了华为
近日,沃尔沃宣布与电子游戏公司Pole Position Production合作研究未来
从产品分析,目前特斯拉的产品还处于L2的阶段,从今年第一季度的财报上看纯
感知神经网络,8个摄像头覆盖360°,比人类感知范围更大更安全;对现实道路的技术还有待突破,
。 一、点云标注的基础原理 点云标注是通过传感器捕捉到的环境信息来生成三维点云数据,然后通过对点云数据的处理和识别来实现环境感知。点云标注的准确性直接影响到


扫一扫关注我们



